RC proto outside: The goal of this project was to test the capability of an RC-controlled robot. Its future goal was to become a lawnmower — but as most of my projects go, it ended up not finished lol.
📽️ Watch the Project in Action
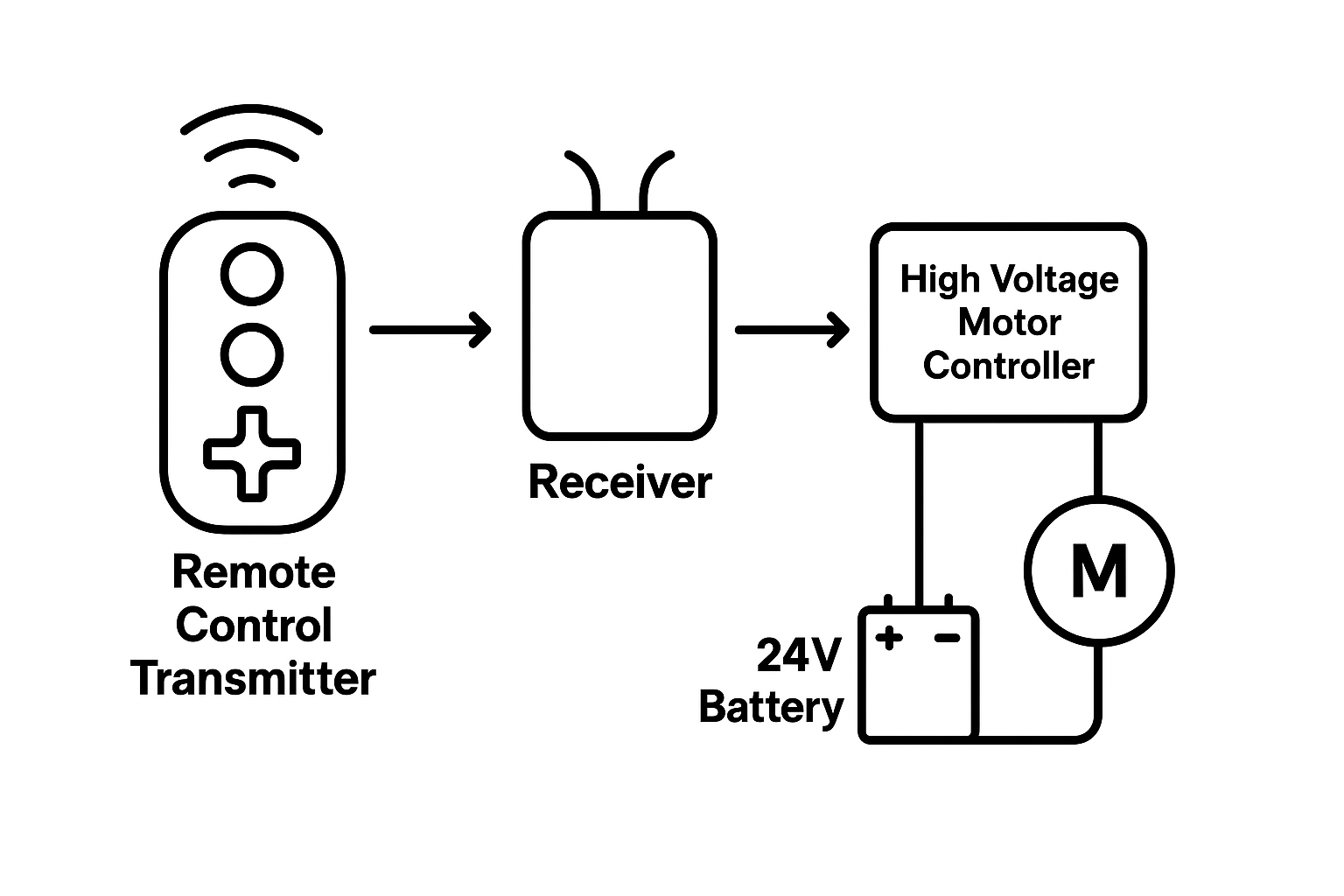
📐 Project Diagram
Notes:
This project is pretty old — I think the wheel positives/negatives went directly to the controller.
The wheels run on 24V from two batteries in series, routed through the controller.
The motor driver isn’t a typical H-bridge. It’s a higher-voltage/amp unit rated for 24V and the motor draw.
Motor controller was sourced from RobotShop.
Wheels and motor are wheelchair motors. Sourced from ebay.
Electric brakes were removed from wheelchair motors.
Frame was built by Father-In-Law, using scrap metal. Welded together.
High voltage/amp motor Controller was RC/signal ready.
🧰 Parts List
RC transmitter (plane/car style)
Multi-channel receiver (steering, throttle, etc.)
Two 12V batteries in series (24V)
Wheelchair motors or other suitable DC motors
Sturdy chassis
💡 Code
// None needed. Control is via RC transmitter/receiver.
If you want custom behaviors later, add a microcontroller (Arduino/Raspberry Pi) between receiver and motor controller.
📘 Related
📽️ Version two (don’t know why the video is sideways)
 🔙 Back to Projects
🔙 Back to Projects